Kinematic Bicycle Model Code

Liteville H 3 B Review Enduro Mountainbike Magazine Downhill Bike Cross Country Mountain Bike Hardtail Mtb

Propain Rage Cf

Bisiklet Tutkusu Panosundaki Pin

Delta Robot Kinematics With Solidworks And Labview Copy Youtube Delta Robot Robot Delta

Jelly Kinematic Pavilion Rhino Grasshopper Kinetic Architecture Folding Architecture Pavilion
Simple Understanding Of Kinematic Bicycle Model By Yan Ding Medium

2 1 1 kinematic model the robot moves in a configuration space x.
Kinematic bicycle model code. The second one is a dynamic model usually called bicycle model. The transition model is built based on a kinematic bicycle model to compute the speed and position changes of each vehicle 32 the speed v t 1 at the center of gravity and the heading angle ψ t. This is a good exercise to try yourself to practice applying the principles of instantaneous center of rotation and follow the rear axle derivation quite closely. Assignments and notes for the self driving cars course offered by university of toronto on coursera vinohith self driving car specialization.
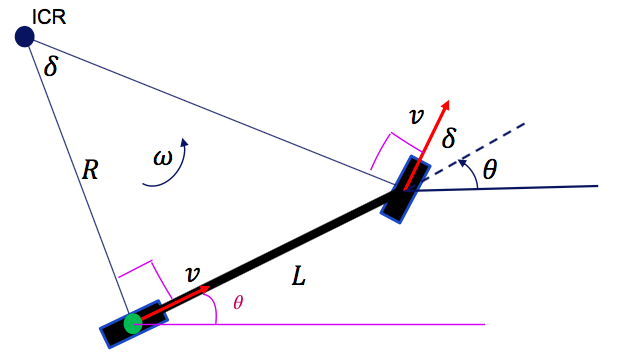
The assumptions that the model is founded on are as. This model represents a vehicle with two axles separated by a distance wheelbase the state of the vehicle is defined as a three element vector x y theta with a global xy position specified in meters and a vehicle heading angle theta specified in radians. The bicylce kinematic model block creates a bicycle vehicle model to simulate simplified car like vehicle dynamics. 2 1 vehicle model we present in this section two different kinds of vehicle model.
The so called bicycle vehicle model is a rather simple model structure that is frequently being used in the vehicle dynamics literature. A configuration is given by x y 0 where x. The first one is a simple kinematic model which is used in many path planning works. Bicyclekinematics creates a bicycle vehicle model to simulate simplified car like vehicle dynamics.
This repo was develop during a small reseach about indoor robot localizaton using kalman filters for non linear systems. This model represents a vehicle with two axles defined by the length between the axles wheel base the front wheel can be turned with steering angle psi the vehicle heading theta is defined at the center of the rear axle. The actual modeling work was originally carried out by erik narby in his. In this example we will start off with this model structure and try to estimate the longitudinal and the lateral stiffness of a tire.
Open loop bicycle model to come up with a suitable controller i first need a model that describes the open loop dynamics of the system i e. Widely used in robotics for simullations tracking and path planning. Development of a kinematic simulator of the famous bicycle model sometimes called wrongly as the ackemann model.

Polygon Collosus Dhx Fahrrad Fahren Fahren

Lesson 2 The Kinematic Bicycle Model Module 4 Vehicle Dynamic Modeling Coursera

5 Incredible Bike Inventions You Must See In 2017 Bike Gadgets Inventions Bicycle

Scott Genius 720 Bike Bike Reviews Scott Sports Bike

Visit To Buy Mountain Bike 26 Inch Bicycle Two Wheels Rim Set Stickers For Enve M60 Replacement Race Cycling Decals Free Shipping Adverti Bicycle Mountain Bike Wheels Mountian Bike

Home Interior Design Decoration Everything You Need To Know Stunt Bike Diseno De Motocicletas

New Rocky Mountain Slayer Is A Bigger Badder And Heftier Mountain Bike Than Ever Before Mountain Biking Bike Rocky Mountains
Compute Car Like Vehicle Motion Using Bicycle Kinematic Model Simulink

Tessa S Overview 3d Printing At Milan Design Week Leo Lane Milan Design Week Generative Design Milan Design Week 2017

Pin On Kids

10339296 1487133891499511 992047585163496280 O Jpg 2048 1536 With Images Wings Maleficent Wings Cosplay Wings
This Is The Polar Coaster Drawing Machine It Was Designed As A Demonstration Of Polar Kinematics This Version Draws Thing Drukarka 3d Elektronika Technologia

Statics Lecture 23 Simple Truss Analysis Method Of Joints Revised 3 4 13 Engineering Mechanics Statics Applied Science Engineering Science
